DynamicProgramming알고리즘
1. 동적 프로그래밍 개발 4단계
- 최적 해의 구조를 파악
- 최적 해의 값을 재귀적으로 정의
- 최적 해의 값을 일반적으로 bottom-up(상향식) 방식으로 계산
- 계산된 정보를 이용해 최적 해를 구성
2. 예제 1: 행렬 곱셈 순서 (Matrix-Chain Multiplication)
- 문제: 여러 행렬을 순차적으로 곱할 때, 곱셈 순서에 따라 성능 차이가 발생
- 예: $(A1 \times A2) \times A3$는 7,500번의 곱셈이 필요하지만, $A1 \times (A2 \times A3)$는 75,000번의 곱셈이 필요 (10배 이상 차이)
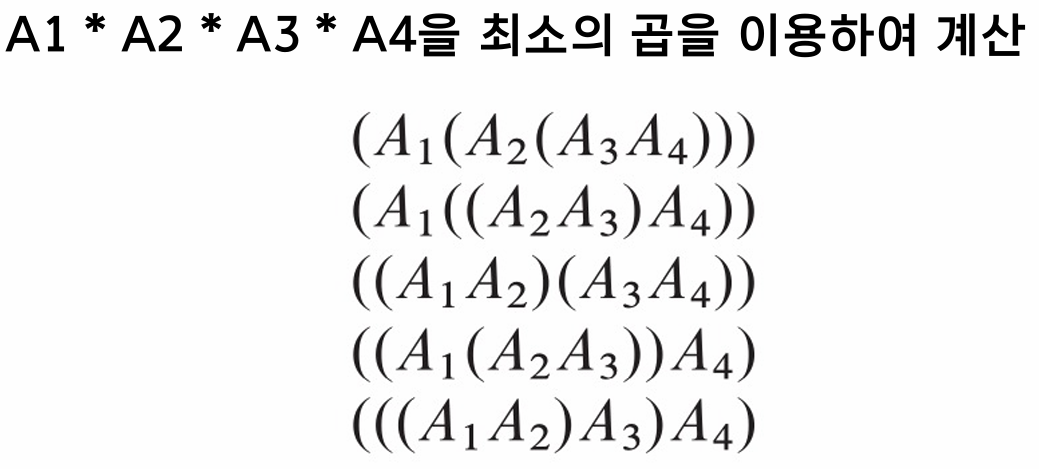
- 목표: 최소의 곱셈 횟수로 행렬 연산을 완료하는 최적의 순서(괄호 치기)를 결정.
- DP 적용:
- 최적 구조: $A_i...A_j$의 최적 해는 $(A_i...A_k) \times (A_{k+1}...A_j)$ 형태의 두 하위 문제의 곱으로 분할됨
- 재귀 정의: $A_i...A_k$의 최적해와 $A_{k+1}...A_n$의 최적해를 각각 구함.
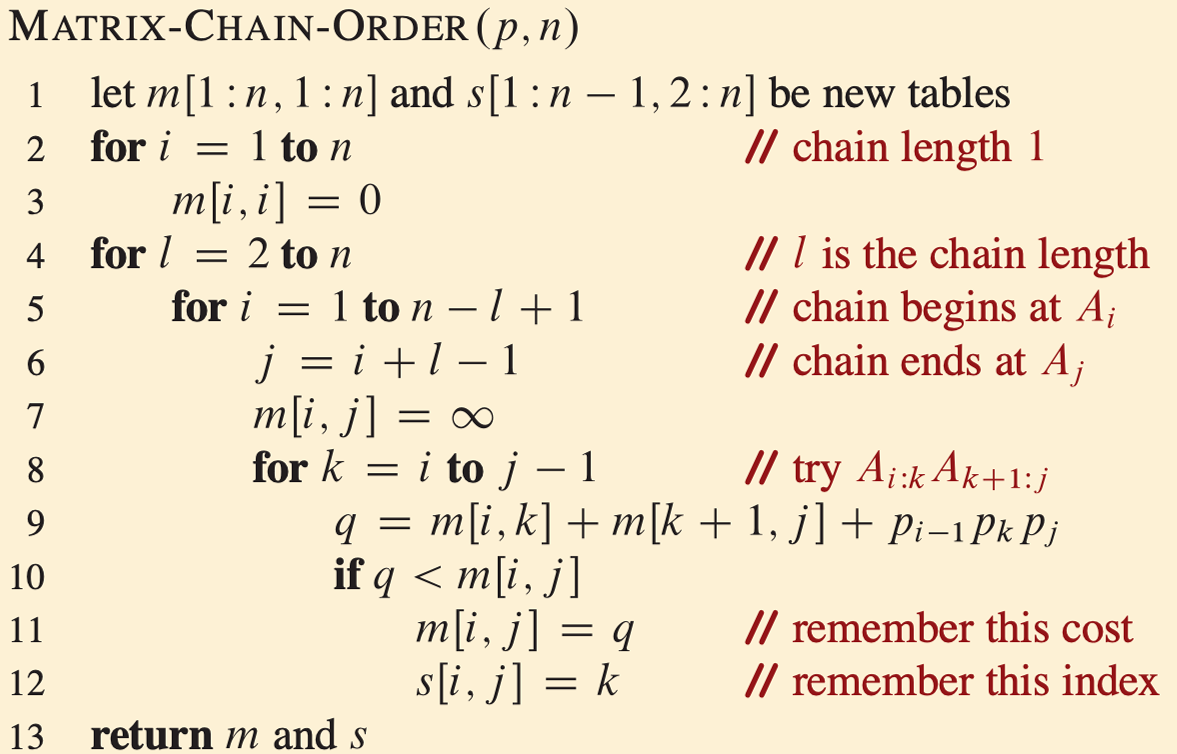
- 알고리즘: MATRIX-CHAIN-ORDER
- $m[i, j]$: $A_i$부터 $A_j$까지 곱셈의 최적 연산 횟수.
- $s[i, j]$: $A_i...A_j$를 최적으로 분할하는 인덱스 $k.
- 기저 상태: $m[i, i] = 0$ (연쇄 길이 1)
- 계산 (Bottom-up): 연쇄 길이 $l$을 2부터 $n$까지 증가시키며 $m$ 테이블을 채움.
- $m[i, j]$ 계산 시 ($j = i+l-1$), $i \le k < j$인 모든 $k$에 대해 분할 $(A_i...A_k)(A_{k+1}...A_j)$을 시도.
- 비용 $q = m[i, k] + m[k+1, j] + p_{i-1}p_k p_j$ (두 부분 문제의 비용 + 최종 곱셈 비용).
- $q$가 $m[i, j]$의 현재 값보다 작으면 $m[i, j] = q$로 갱신하고 $s[i, j] = k$로 기록
- 최적해 구성:
- 최종 최적 비용은 $m[1, n]$ (예: $m[1, 6]$)
- $s$ 테이블을 재귀적으로 추적하여 실제 곱셈 순서를 알아냄 (예: $s[1, 6] = 3$이면 $(A1 A2 A3)(A4 A5 A6)$로 분할)

3. 예제 2: 최장 공통 부분 수열 (LCS)
- 문제: 두 입력 시퀀스 X와 Y의 최장 길이 공통 부분 수열(Longest Common Subsequence)을 찾는 문제
- 부분 수열 (Subsequence): 원래 수열에서 일부 원소를 삭제하되, 남은 원소들의 상대적 순서는 유지.
- DP 적용 (재귀적 해법):
- $c[i, j]$: $X_i = \langle x_1...x_i \rangle$와 $Y_j = \langle y_1...y_j \rangle$ 사이의 LCS 길이
- 기저 상태: $i=0$ 또는 $j=0$ 이면, $c[i, j] = 0$
- $x_i = y_j$ (문자가 일치할 때): $c[i, j] = c[i-1, j-1] + 1$. (LCS 길이가 1 증가)
- $x_i \ne y_j$ (문자가 불일치할 때): $c[i, j] = \max(c[i, j-1], c[i-1, j])$. (두 하위 문제 중 더 긴 쪽을 선택)
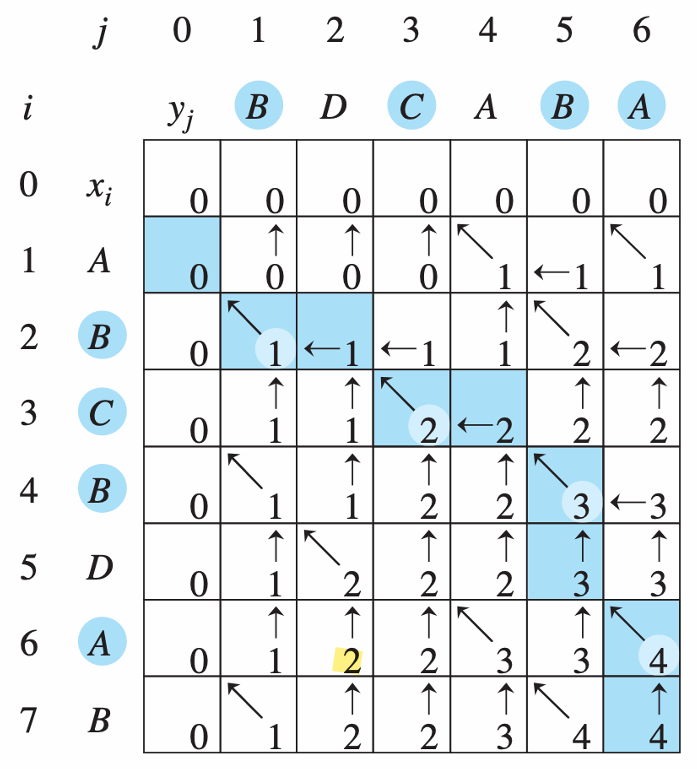
- 알고리즘: LCS-LENGTH
- $c$ (LCS 길이) 테이블과 $b$ (경로 재구성을 위한 방향) 테이블을 생성.
- $c[i, 0]$과 $c[0, j]$를 0으로 초기화
- 2중 루프(i, j)를 돌며 $c$ 테이블과 $b$ 테이블을 채움
- $x_i = y_j$이면 $b[i, j]$에 "대각선"($\diagup$) 표시.
- $x_i \ne y_j$일 때, $c[i-1, j]$가 더 크면 "위"($\uparrow$), $c[i, j-1]$가 더 크거나 같으면 "왼쪽"($\leftarrow$) 표시
- 시간 복잡도: $\Theta(mn)
- 최적해 구성: PRINT-LCS
- $c[m, n]$ (예: (7, 6))에서 시작하여 $b$ 테이블의 화살표를 역으로 추적
- $b[i, j]$가 "대각선"이면, $x_i$는 LCS의 요소임. $x_i$를 출력하고 $(i-1, j-1)$로 이동
- "위"이면 $(i-1, j)$로 이동. "왼쪽"이면 $(i, j-1)$로 이동
AllPairShortestPathAlgorithm
1. 문제 정의
- 목표: 그래프의 한 정점 u에서 다른 정점 v로 가는 가장 빠른 경로(shortest path) 탐색
- 입력: 가중치가 있는 방향 그래프 $G=(V, E)$3. 가중치 함수 $w: E \rightarrow \mathbb{R}$는 간선에 실수 값을 매핑
- 경로 가중치 $w(p)$: 경로 $p$를 구성하는 간선들의 가중치 합
- 최단 경로 가중치 $\delta(u,v)$: u에서 v로 가는 경로가 존재하면 최소 가중치(min), 없으면 $\infty$.
2. 기본 접근법
- Single Source Shortest Paths (SSSP): 하나의 출발점에서의 최단 경로는 Bellman-Ford (음수 가중치 포함) 또는 Dijkstra (음수 가중치 없음) 알고리즘을 사용
- APSP 해결: 모든 정점(vertex)을 출발점으로 하여 SSSP 알고리즘을 각각 수행하는 방식
3. 동적 프로그래밍 접근 (행렬 곱셈 유사)

- 동적 프로그래밍을 기반으로 하며, 반복적인 행렬 곱셈과 유사한 연산을 수행
- $l_{ij}^{(r)}$: $i$에서 $j$까지 최대 $r$개의 간선을 사용하는 경로의 최소 가중치
- 기저 상태 ($r=0$): $l_{ij}^{(0)}$는 $i=j$일 때 0, $i \ne j$일 때 $\infty$.
- 재귀 정의: $l_{ij}^{(r)} = \min_{1 \le k \le n} \{ l_{ik}^{(r-1)} + w_{kj} \}$.
- 이는 최대 $r-1$개 간선 경로 13또는 $i$에서 $k$까지 $r-1$개 간선 경로 + $(k, j)$ 간선 경로 중 최솟값을 찾는 것.
- 행렬 곱셈과의 관계:
- 일반 행렬 곱셈 $C = A \cdot B$는 $c_{ij} = \sum_{k=1}^{n} a_{ik} \cdot b_{kj}$
- 최단 경로 알고리즘은 이 연산을 $\sum$ 대신 min으로, $\cdot$ 대신 +로 재정의하여 사용
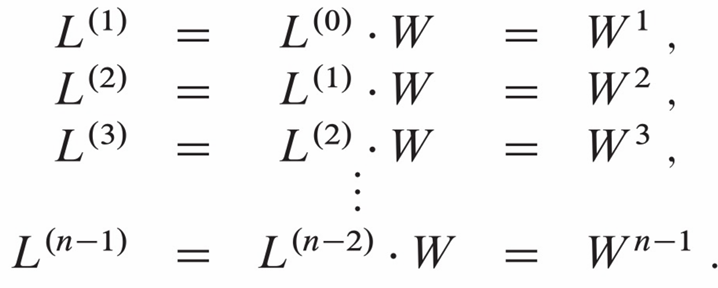
- $L^{(1)} = W$, $L^{(2)} = W^2$, ... $L^{(n-1)} = W^{n-1}$을 계산.
- 최종 $L^{(n-1)}$ 행렬이 모든 쌍의 최단 경로 가중치를 포함
- 알고리즘: FASTER-APSP
- $L^{(n-1)}$을 구하기 위해 $W$를 $n-1$번 곱하면 $\Theta(n^4)$ 시간이 소요
- 대신 $W, W^2, W^4, W^8, ...$ 와 같이 거듭제곱을 반복하여 계산 (반복 제곱)
- 이 방식은 $\lceil \lg(n-1) \rceil$ 번의 행렬 곱셈만 필요
- 각 'min-plus' 행렬 곱셈은 $\Theta(n^3)$ 시간이 걸림
- 총 시간 복잡도: $\Theta(n^3 \lg n)$
- FASTER-APSP 의사 코드는 EXTEND-SHORTEST-PATHS를 반복적으로 호출하여 $L = L^2$ 연산을 수행
4. Floyd-Warshall 알고리즘
- 최적 부분 구조(optimal substructure)를 활용하는 동적 프로그래밍 알고리즘.
- $d_{ij}^{(k)}$: $i$에서 $j$로 가는 경로 중, 중간 정점(intermediate vertices)이 $\{1, 2, ..., k\}$ 집합에만 속하는 최단 경로의 가중치
- 재귀 정의:
- $d_{ij}^{(0)} = w_{ij}$ ($k=0$, 중간 정점 없음)
- $d_{ij}^{(k)} = \min(d_{ij}^{(k-1)}, d_{ik}^{(k-1)} + d_{kj}^{(k-1)})$ ($k \ge 1$)
- 의미: $k$를 거치지 않는 경로와 $i \rightarrow k \rightarrow j$ 경로 중 더 짧은 것을 선택.
- 알고리즘: FLOYD-WARSHALL(W, n).
- $D^{(0)} = W$로 초기화
- $k=1$부터 $n$까지, 모든 $i, j$ 쌍에 대해 $d_{ij}^{(k)}$를 갱신하는 3중 루프 사용
- 경로 재구성:
- 선행 정점(predecessor) 행렬 $\Pi^{(k)}$를 사용하여 경로를 재구성.
- $k$를 거쳐가는 경로가 더 짧다면 ($d_{ij}^{(k-1)} > d_{ik}^{(k-1)} + d_{kj}^{(k-1)}$), $j$의 선행 정점은 $k \rightarrow j$ 경로의 선행 정점($\pi_{kj}^{(k-1)}$)이 됨
- 아니라면, $k$를 거치지 않는 경로의 선행 정점($\pi_{ij}^{(k-1)}$)을 유지
'ALGORITHM' 카테고리의 다른 글
| [알고리즘]플로이드-워셜 (Floyd-Warshall) 알고리즘과 존슨 (Johnson) 알고리즘 (0) | 2025.11.13 |
|---|---|
| [알고리즘] A* (A-Star) 알고리즘과 Greedy (탐욕) 알고리즘 (1) | 2025.11.03 |
| [알고리즘] Shortest Path 알고리즘(Bellman-Ford & DIJKSTRA 알고리즘) (0) | 2025.10.20 |
| [알고리즘] 최소 신장 트리 (MST) - 크루스칼 (Kruskal) & 프림 (Prim) 알고리즘 (0) | 2025.10.16 |
| [알고리즘] BFS, DFS와 최소 신장 트리(MST) (0) | 2025.10.13 |